




Ca y est ! Wall-E roule enfin ! Voici l’histoire en vidéo :
Qui aurait cru, il y a près de 7 ans, lorsque j’ai commencé ce projet, que j’aurais réussi à en arriver là ? A l’époque, cela était encore un doux rêve … Mais il faut finalement croire en ses rêves. 😉
Le contexte un peu particulier de cette année m’a tout de même aider à atteindre ce but : confinement + chômage partiel = beaucoup de temps libre à consacrer au robot. Même si j’avais cet objectif un peu en tête depuis quelques mois déjà. D’autant plus que j’ai réussi à trouver un distributeur en Europe des pièces en système métrique goBilda, ce qui m’a permis d’économiser énormément en frais de port. J’avais déjà le système de chenilles Lynxmotion en ma possession (voir l’article consacré à ce système)
Les pièces trouvées, je me suis attaqué à la modélisation 3D pour voir la faisabilité de mon idée. Pour cela, j’ai utilisé l’outil de CAO en ligne OnShape et joué aux Légos avec les modèles 3D de goBilda. Voici le résultat « approximatif » de la conception :
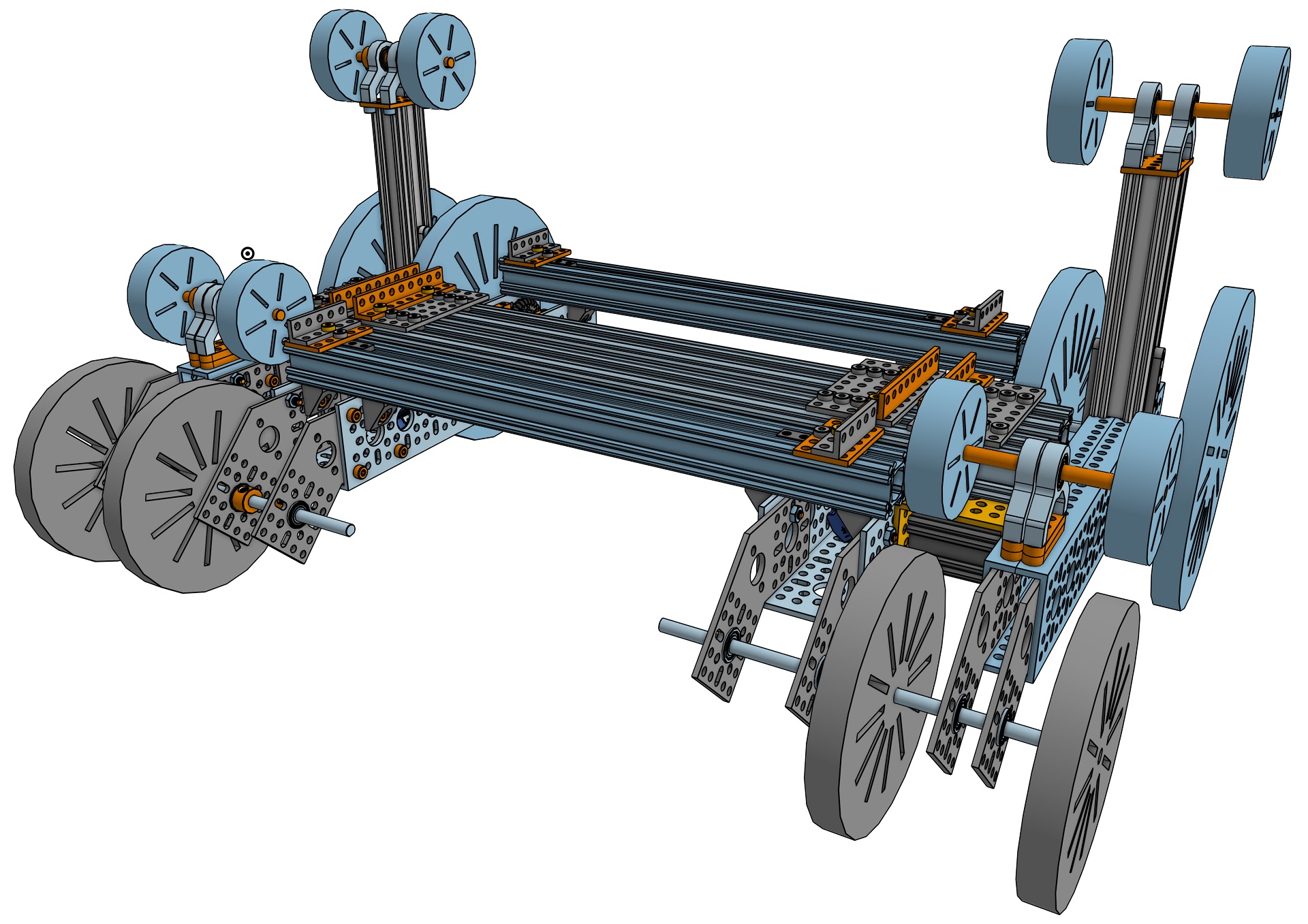
Une fois les pièces commandées, il a fallu passer à l’assemblage. Ce ne fut pas chose aisée ! Autant il est facile d’aller mettre des vis n’importe où sur le modèle 3D, il n’est pas toujours simple de les visser dans la réalité : certains endroits sont difficilement atteignables ! Mais avec quelques ajustements, j’y suis tout de même parvenu.

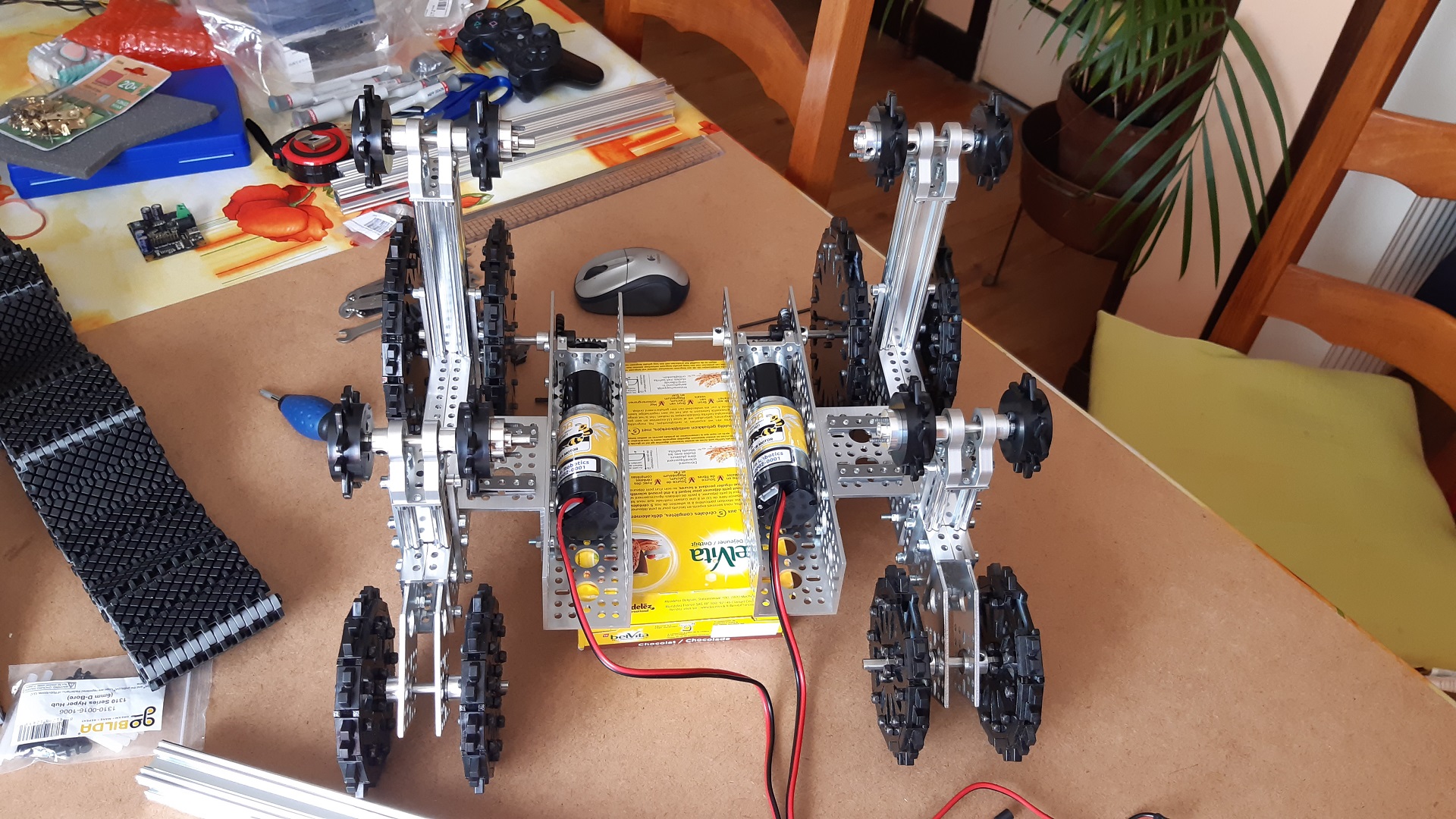
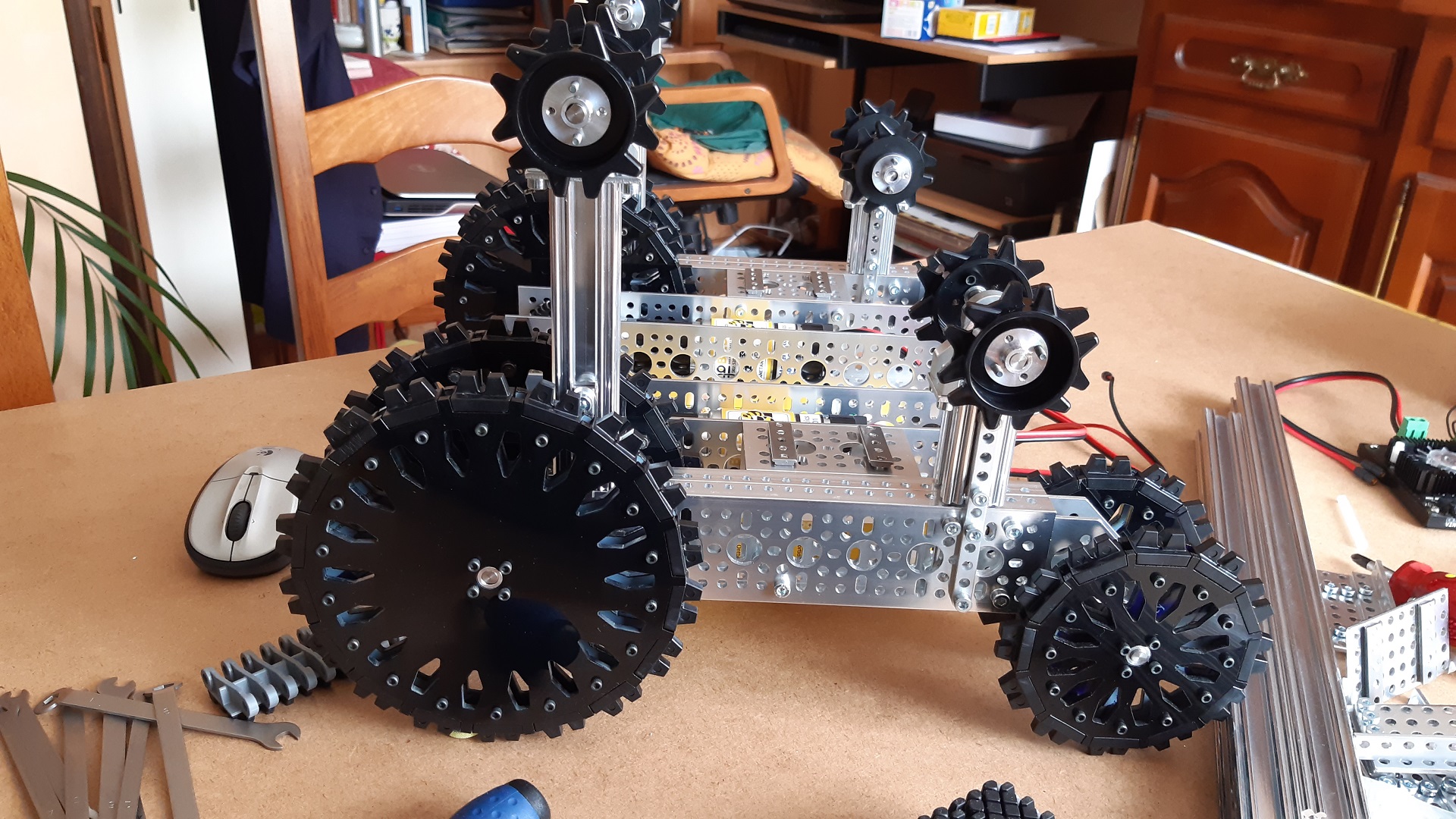
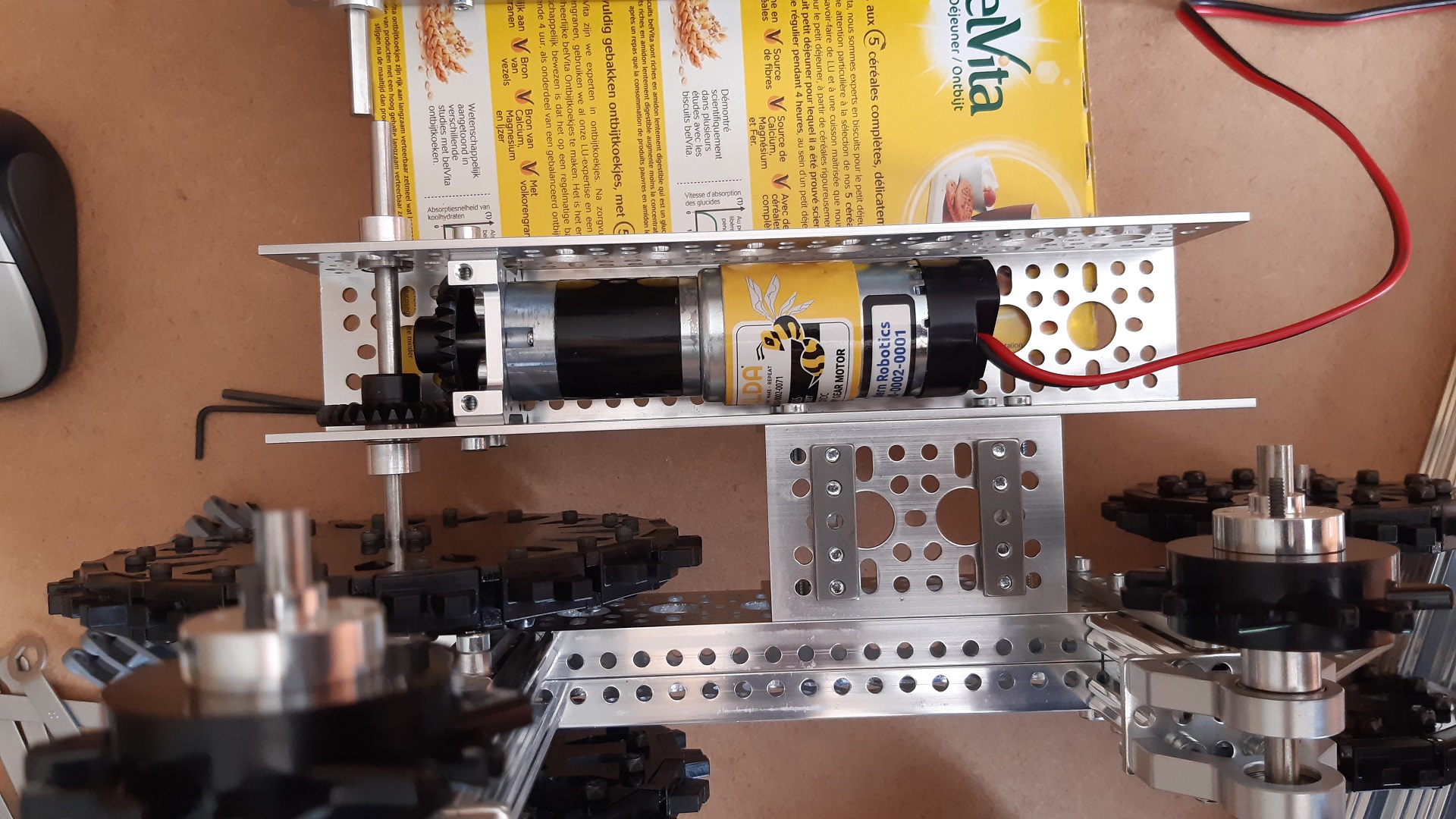

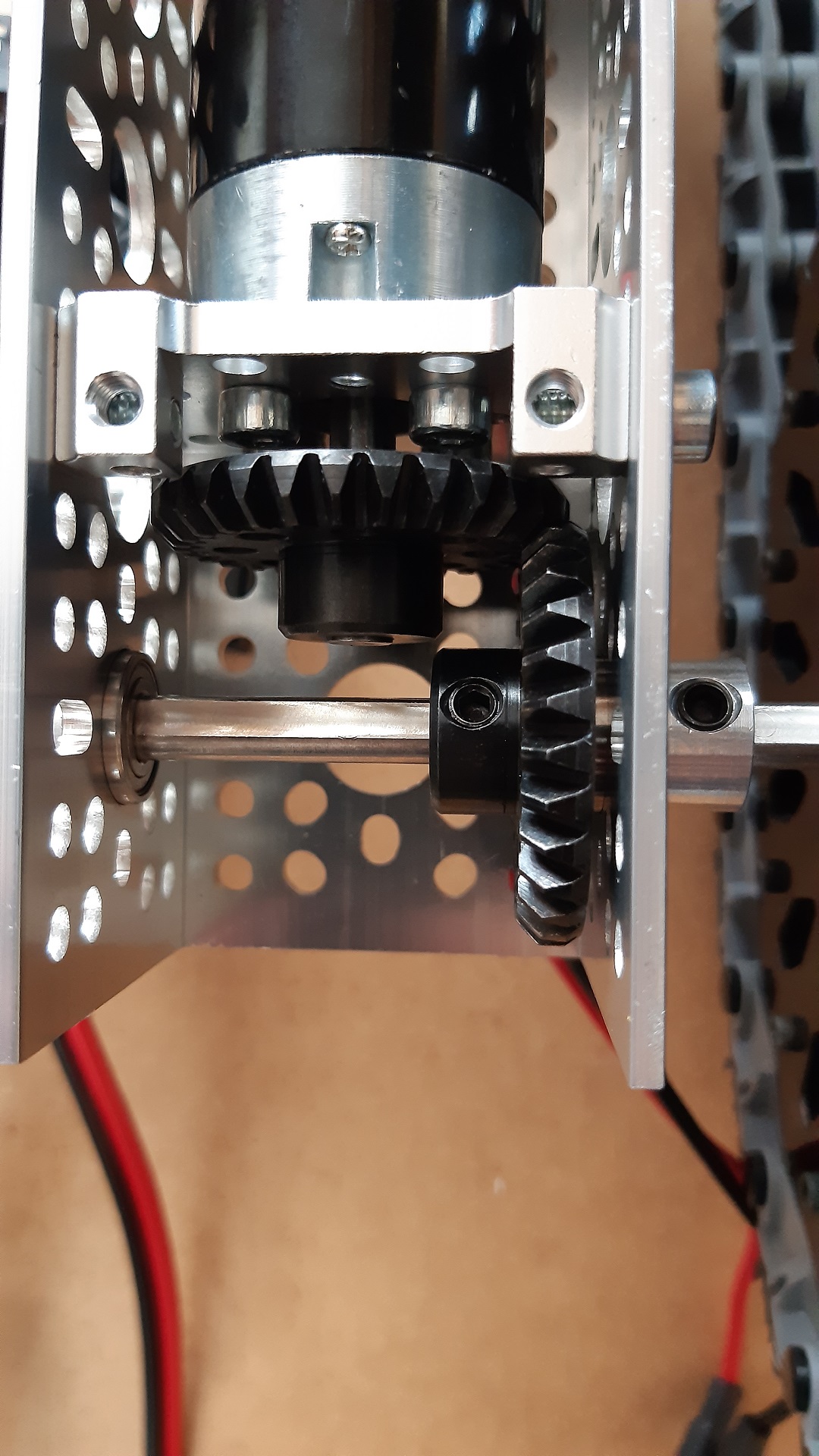

Le châssis assemblé, j’ai effectué quelques tests avec les moteurs. Et là, les problèmes sont arrivés : déraillements des chenilles, dévissage des vis dû aux vibrations et aux fortes contraintes lorsque ça pivote. Pour l’instant, ces problèmes ne sont pas réglés mais plusieurs solutions sont possibles. A suivre …
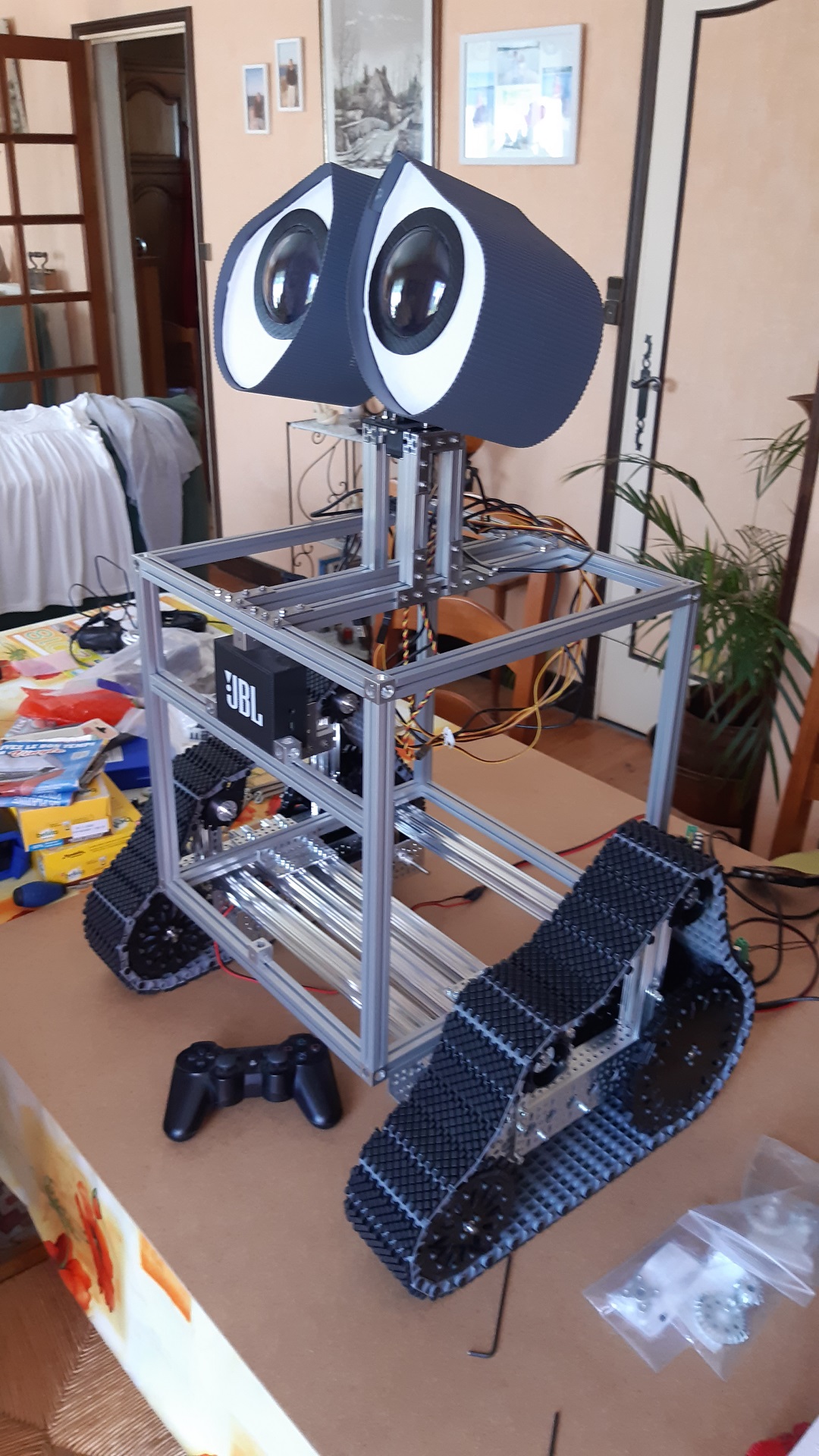
Mais l’essentiel est là : Wall-E roule ! Avec un fil à la patte et un peu d’aide, certes, mais il roule. Maintenant, il faudrait qu’il se déplace de façon autonome, mais là, c’est un autre sujet et un autre défi à relever ! Suite au prochain épisode …