




Ca y est ! Je m’attaque enfin au déplacement du robot : une partie complexe. En effet, Wall-E ne possède pas de simples roues mais un système de chenilles.

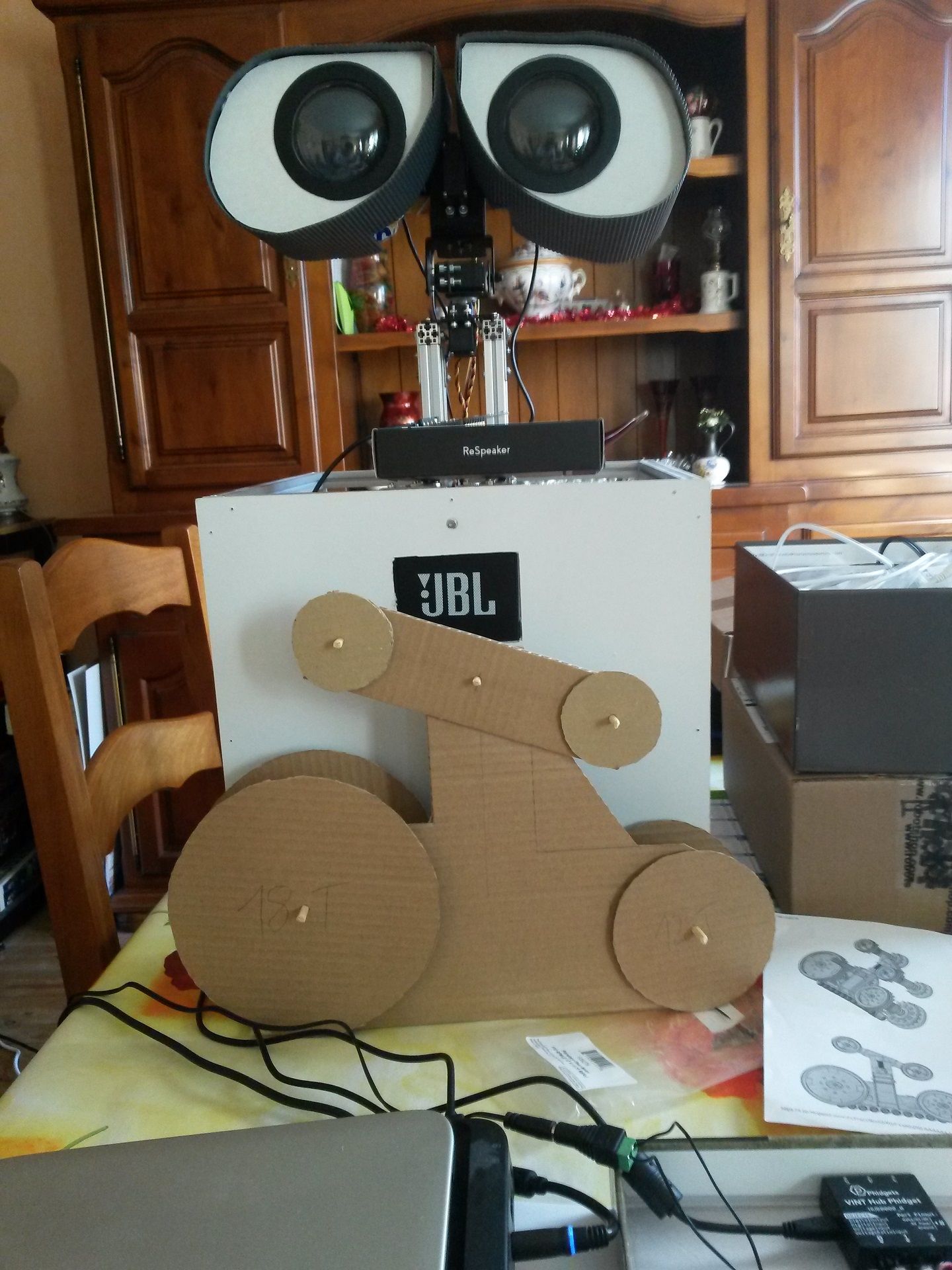
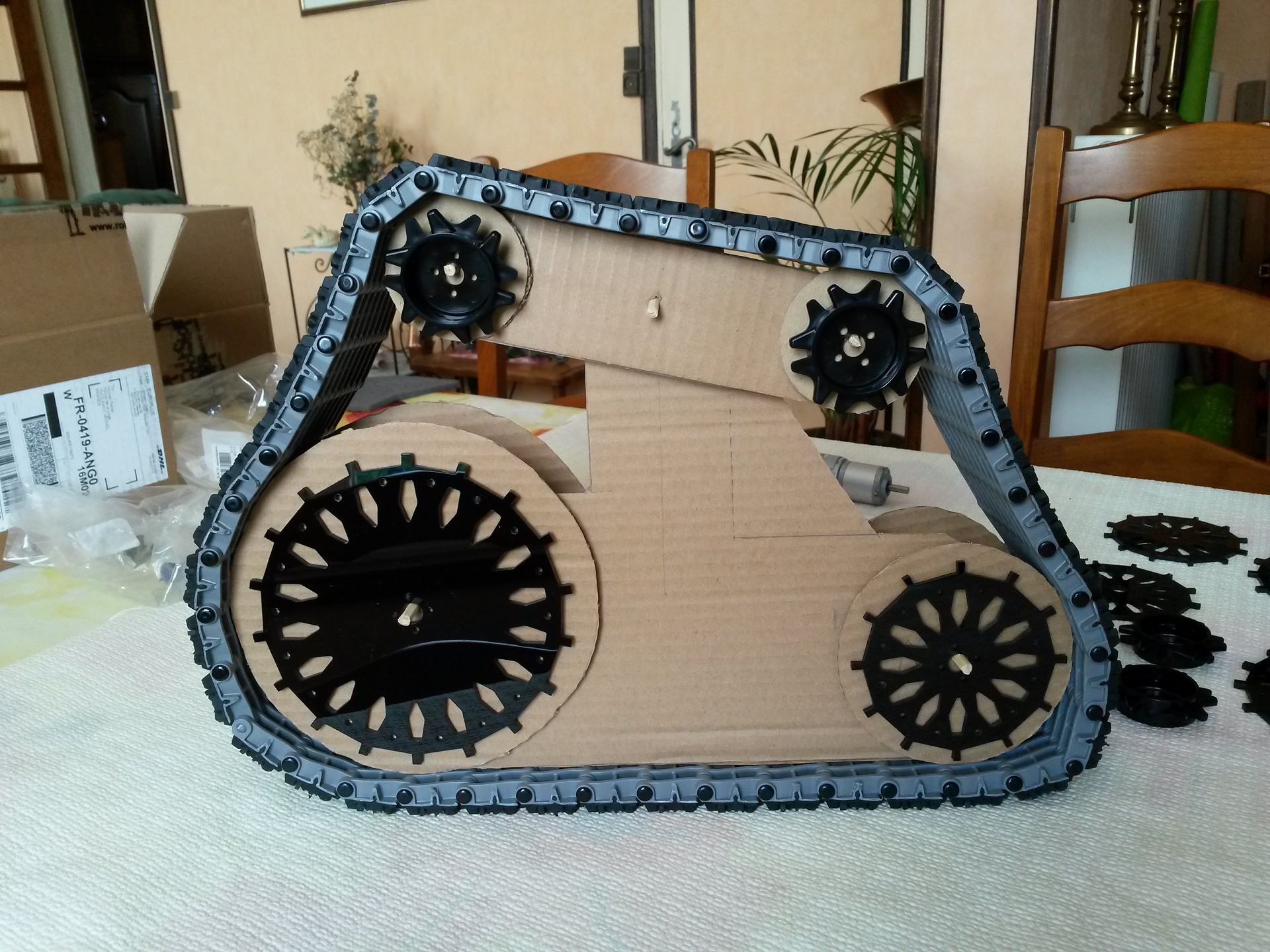
Afin d’avoir une idée de la taille des roues à pignons (barbotins) et du système complet, j’ai d’abord créé un gabarit en carton et en baguettes.
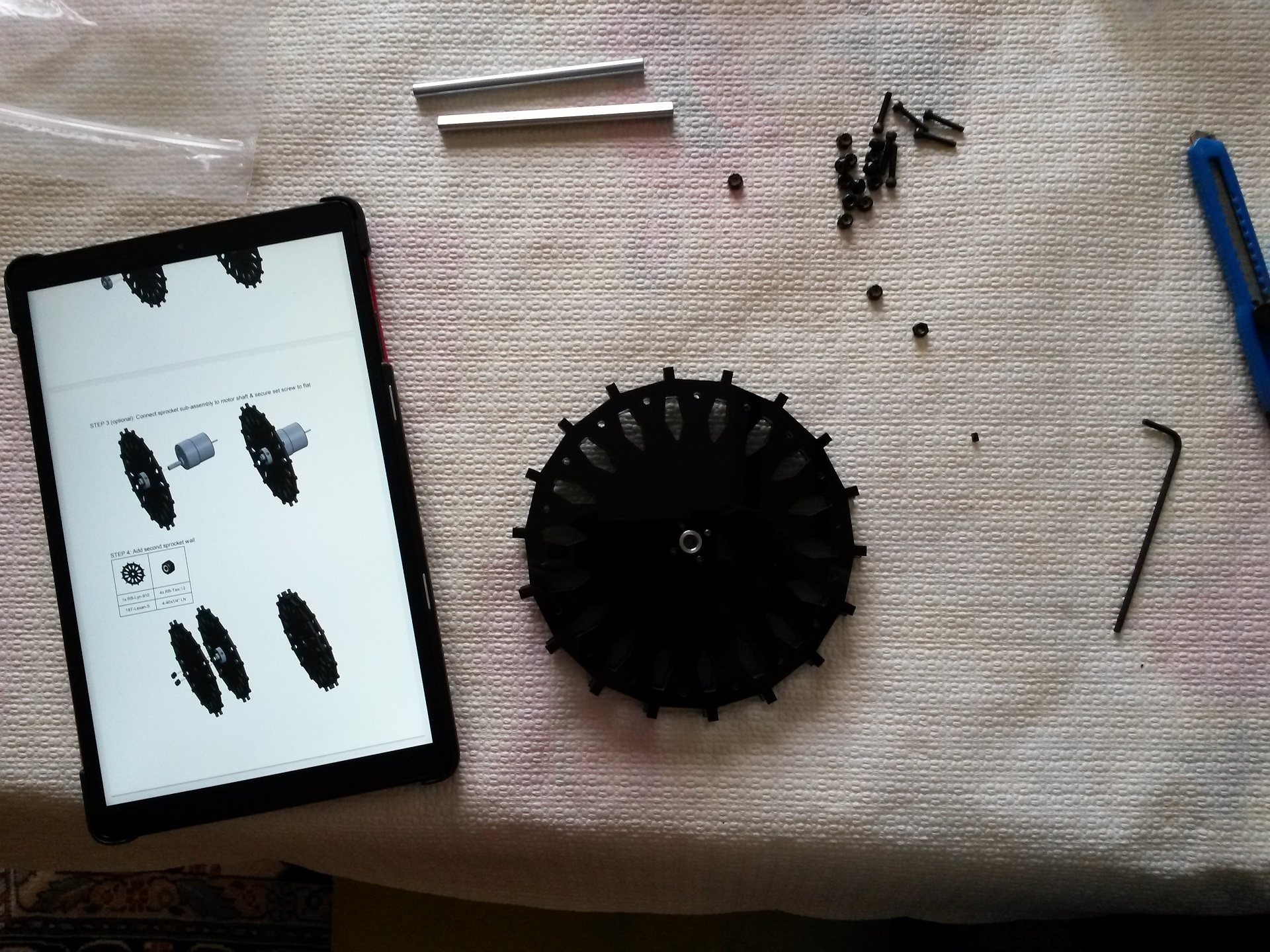
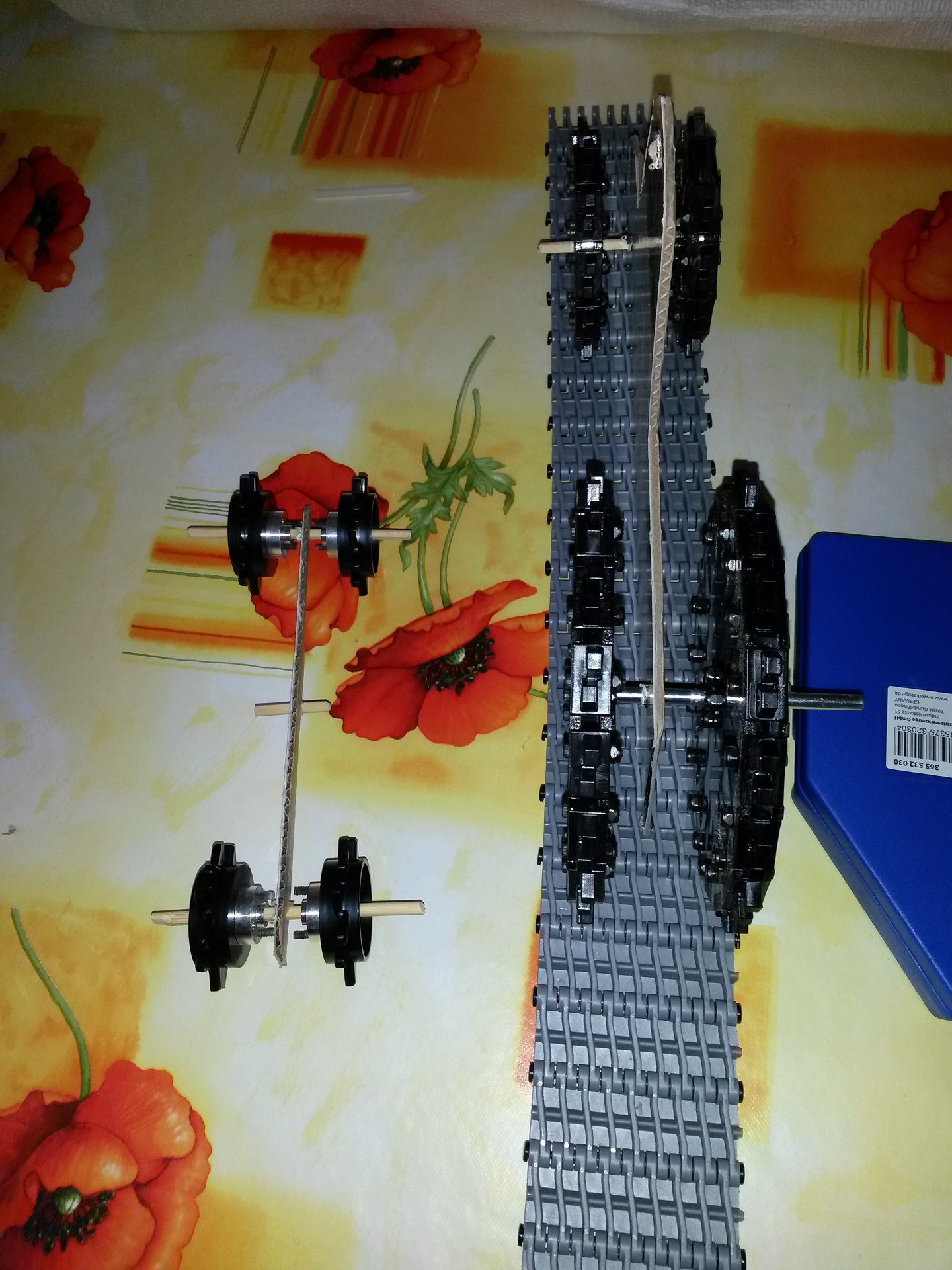
Je me suis tourné vers le système modulaire de Lynxmotion avec leurs roues à pignons. Histoire de ne pas trop faire mal au porte-monnaie et m’assurer que je ne fais pas fausse route, je n’ai commandé que le nécessaire pour faire un seul côté. Et encore, je n’ai rien prévu pour assembler tout ça 😉

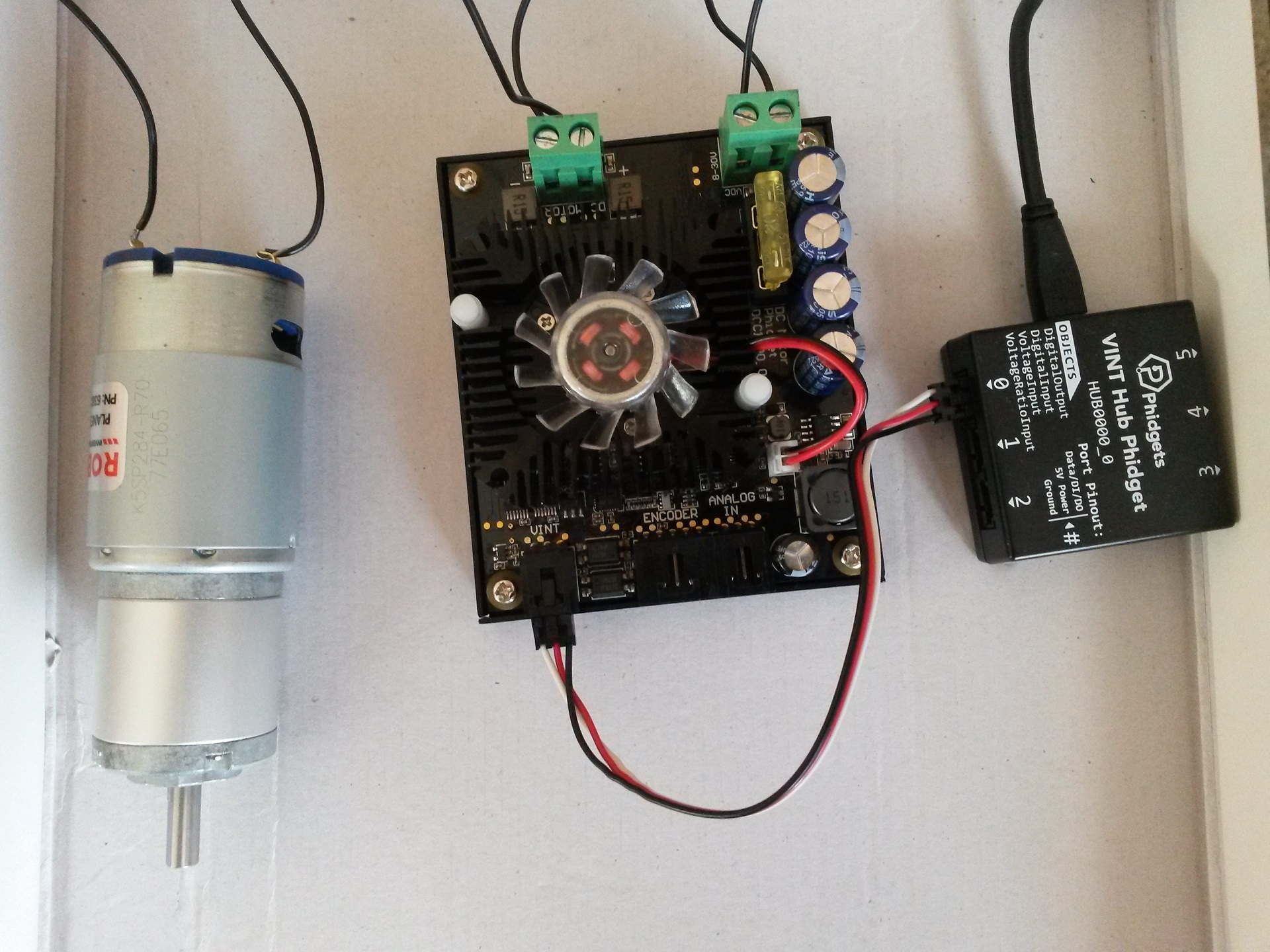
Un système de chenilles fonctionne grâce à la conduite différentielle, c’est à dire que chaque roue a son propre moteur et que pour tourner vers un côté, on fait tourner plus vite la roue du côté opposé. Pour mettre en mouvement tout ça, j’ai pris un moteur à courant continu (12V – 118 RPM – 69 Kg-cm) et un contrôleur Phidgets (le nécessaire pour une seule roue).
Pendant mes congés, j’ai pu programmer la conduite différentielle, le tout contrôlé avec la manette PS3. Je me suis inspiré des explications de cette page. J’ai fait quelques tests (avec qu’un seul moteur !!! oui, je sais, c’est paradoxal) et sur le principe, ça fonctionne. Voici les classes JAVA qui s’occupent de gérer ça : contrôleur PS3 et gestion du mouvement des roues en fonction des ordres reçus.
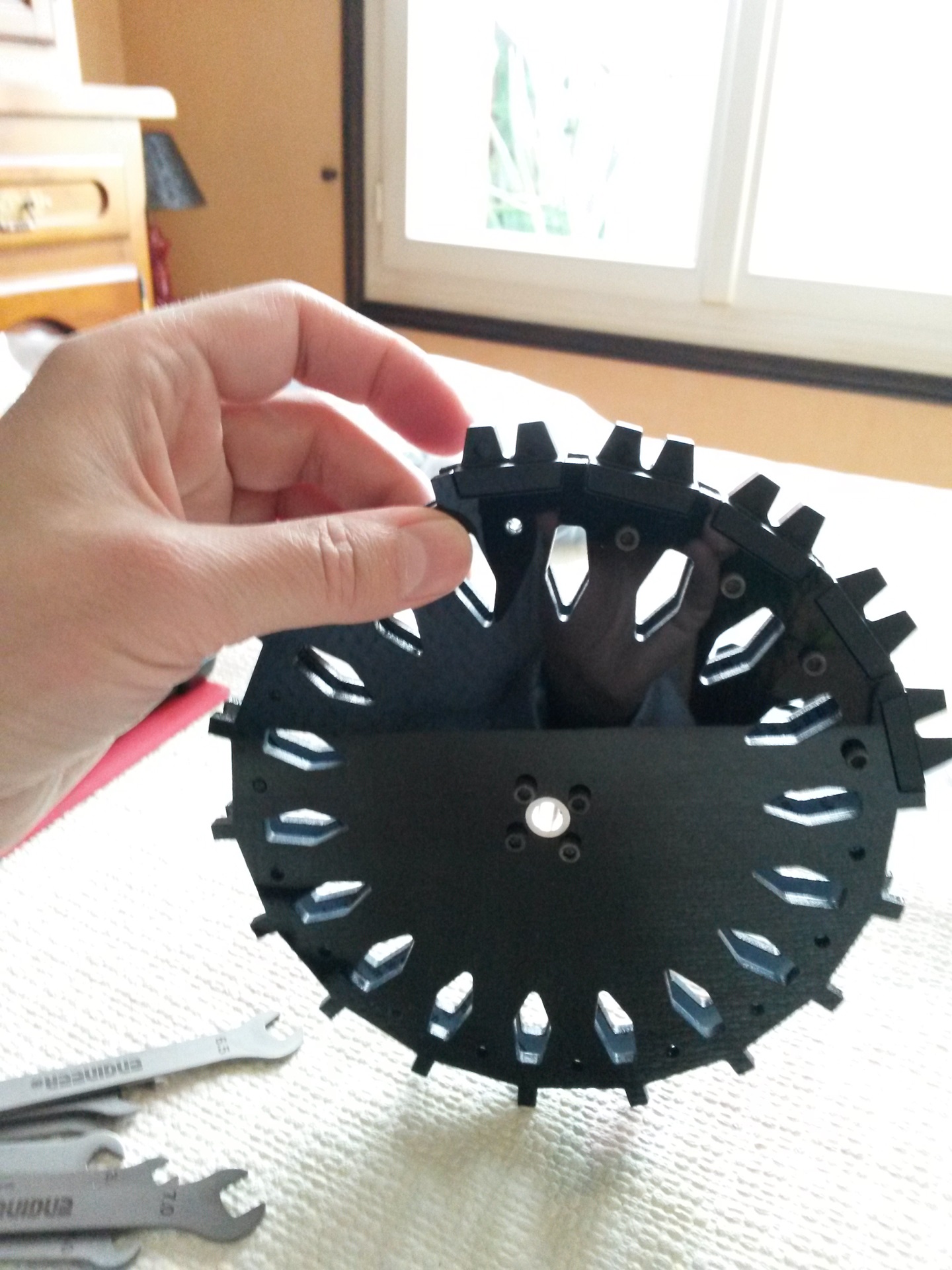
Une fois les éléments du système de chenilles reçus, j’ai pu assembler tout ça et faire un premier test manuel (le tout seulement maintenu avec une structure en carton).

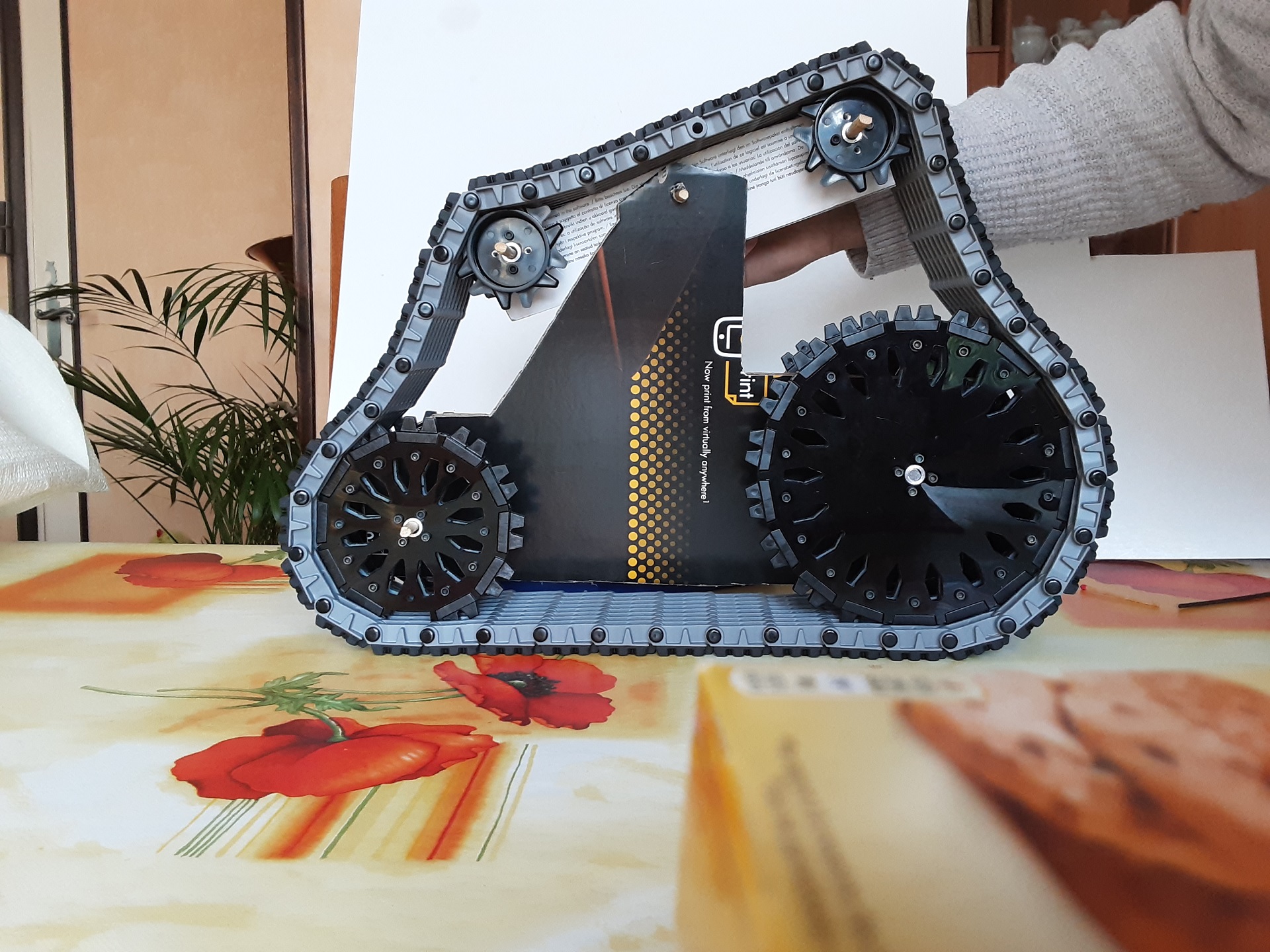
Une petite démo :